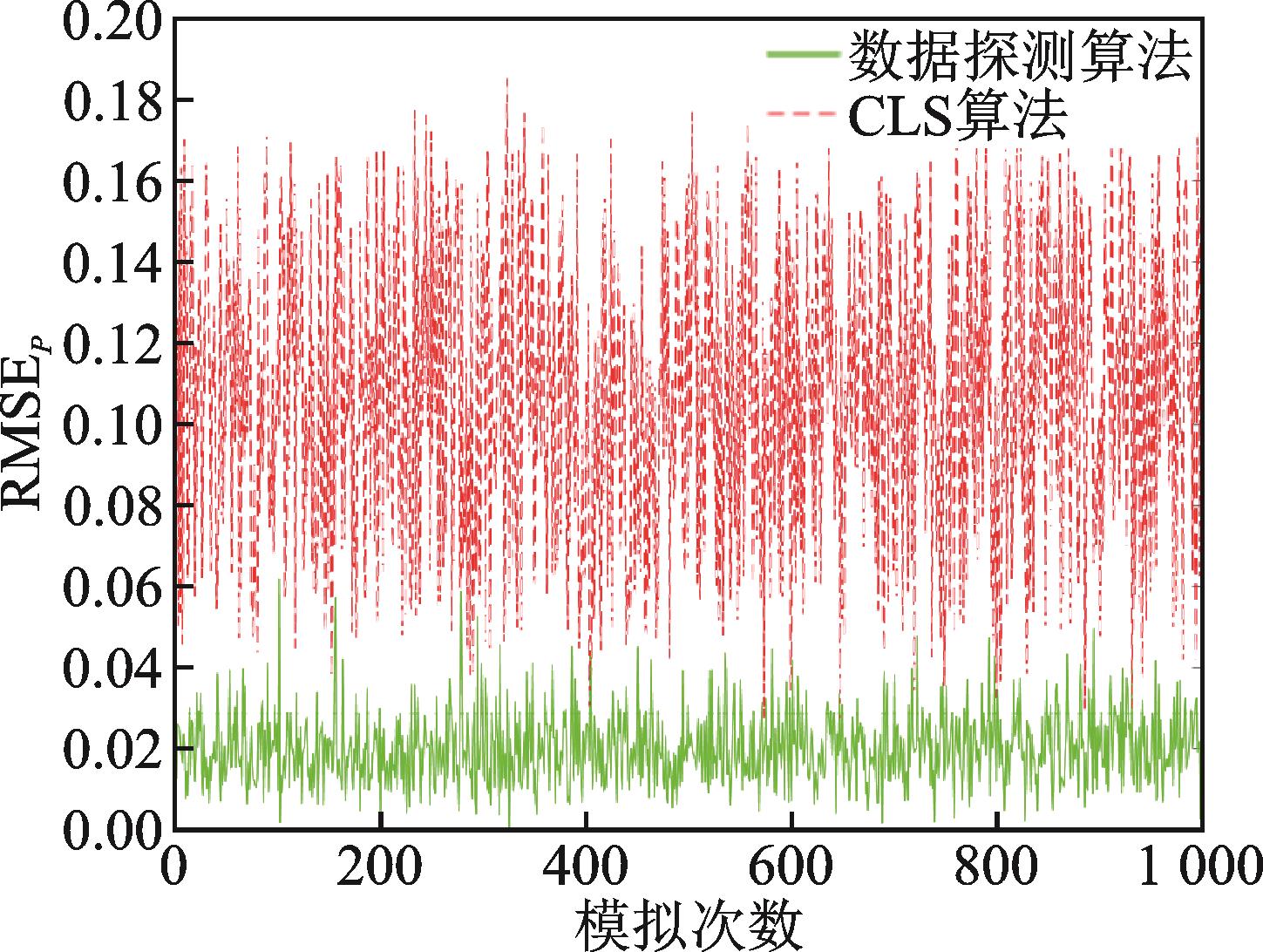
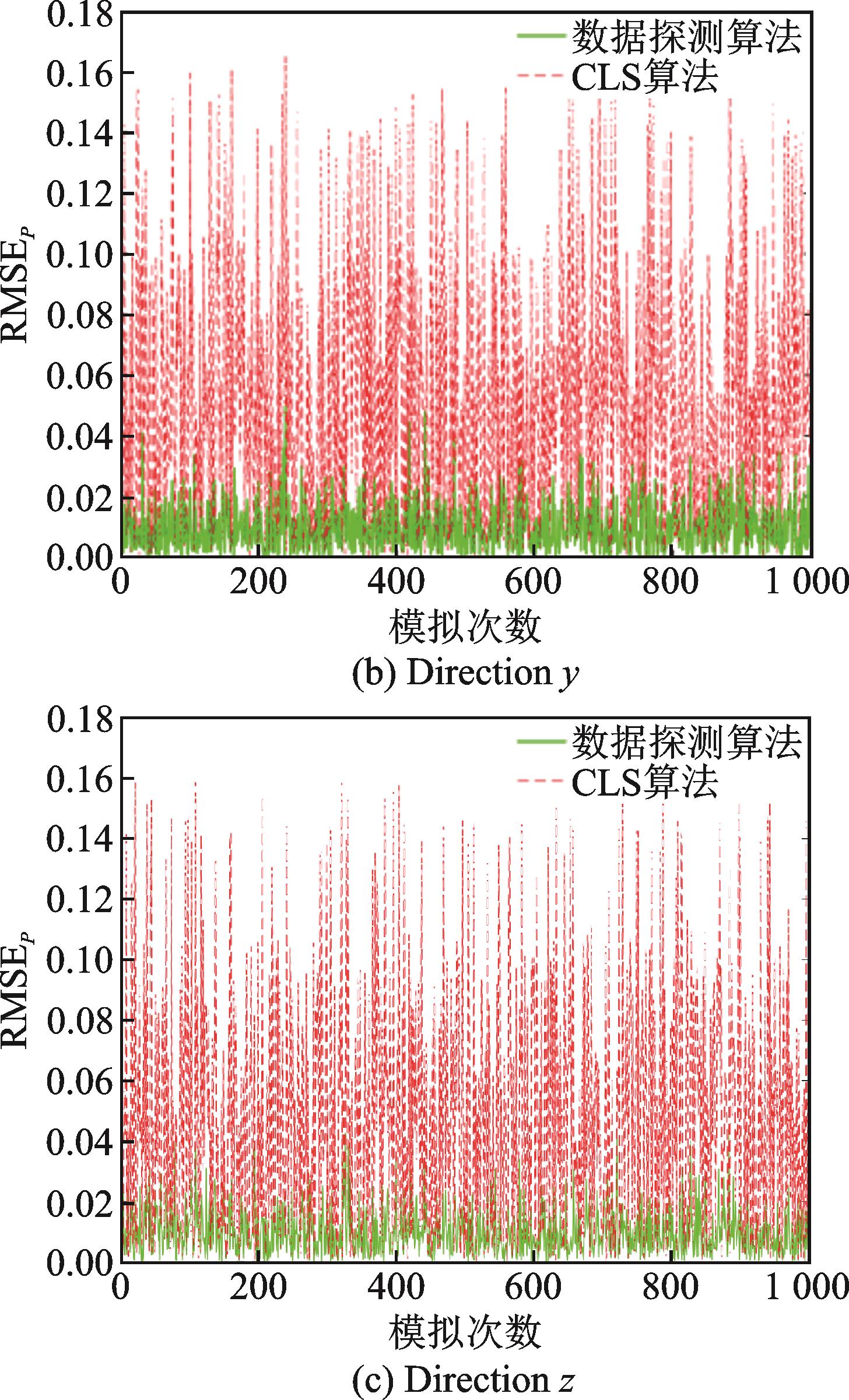
摘要: 三维基准转换广泛应用于大地测量、摄影测量、点云配准等领域,求解大角度、任意比例尺的三维基准转换参数的研究有很多。然而,当观测值中含有粗差时,得到的转换参数估值会受到不利影响甚至被严重扭曲。为处理含有粗差的大角度三维基准转换问题,本文首先将大角度三维基准转换问题抽象为具有等式约束的最小二乘问题(Constrained least squares, CLS),推导参数在正交约束条件下的最小二乘解。然后,将灵敏度分析方法应用到CLS问题中,研究残差加权平方和对观测值扰动的局部敏感性,并基于这些敏感度指标构造局部检验统计量,进而推导出一个适用于CLS问题的粗差探测算法。最后,为核实该算法的有效性进行了仿真与实测数据实验。实验结果表明:本文提出的基于灵敏度检验统计量的数据探测算法可以降低粗差的负面影响,得到可靠的参数估值,从而有效解决大角度三维基准转换中的粗差处理问题。
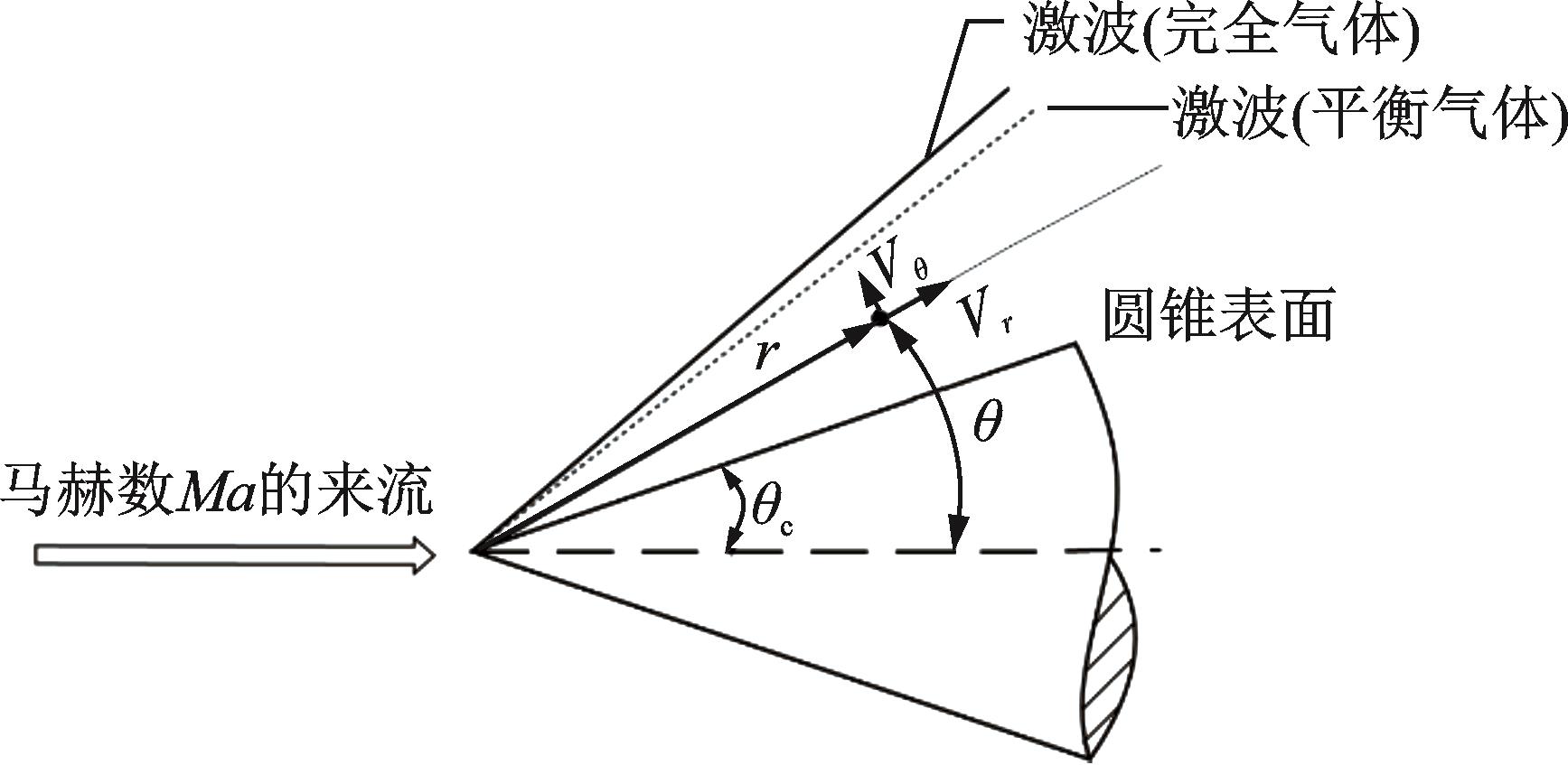
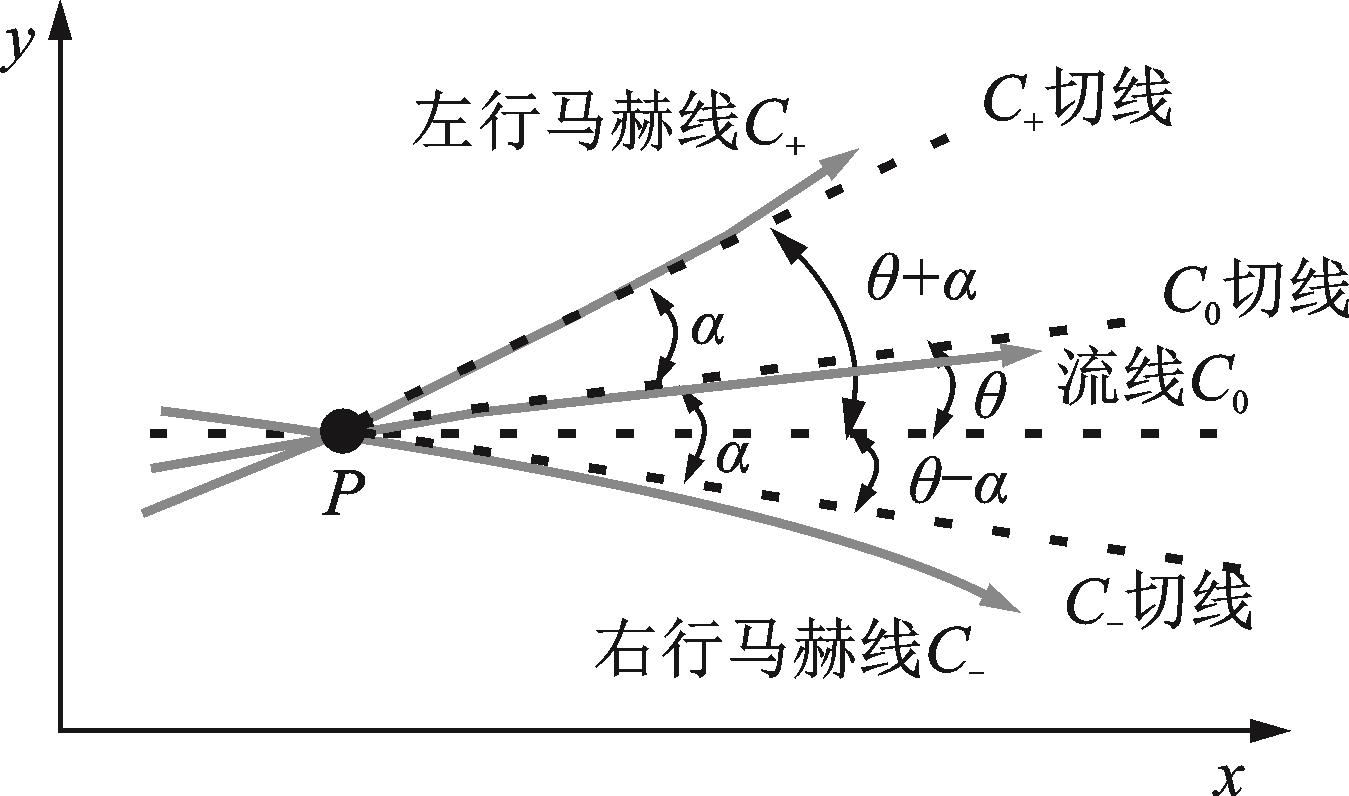
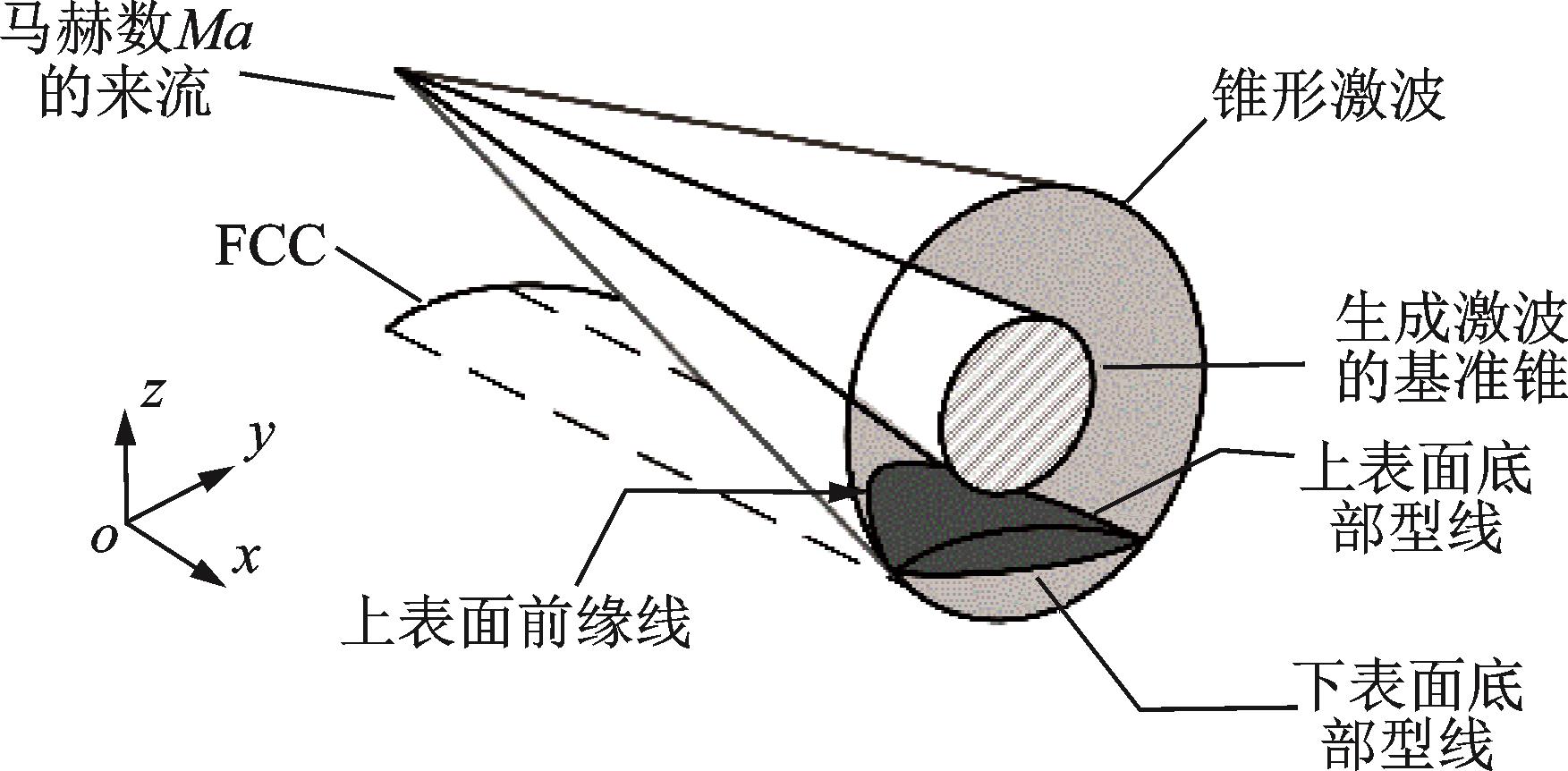
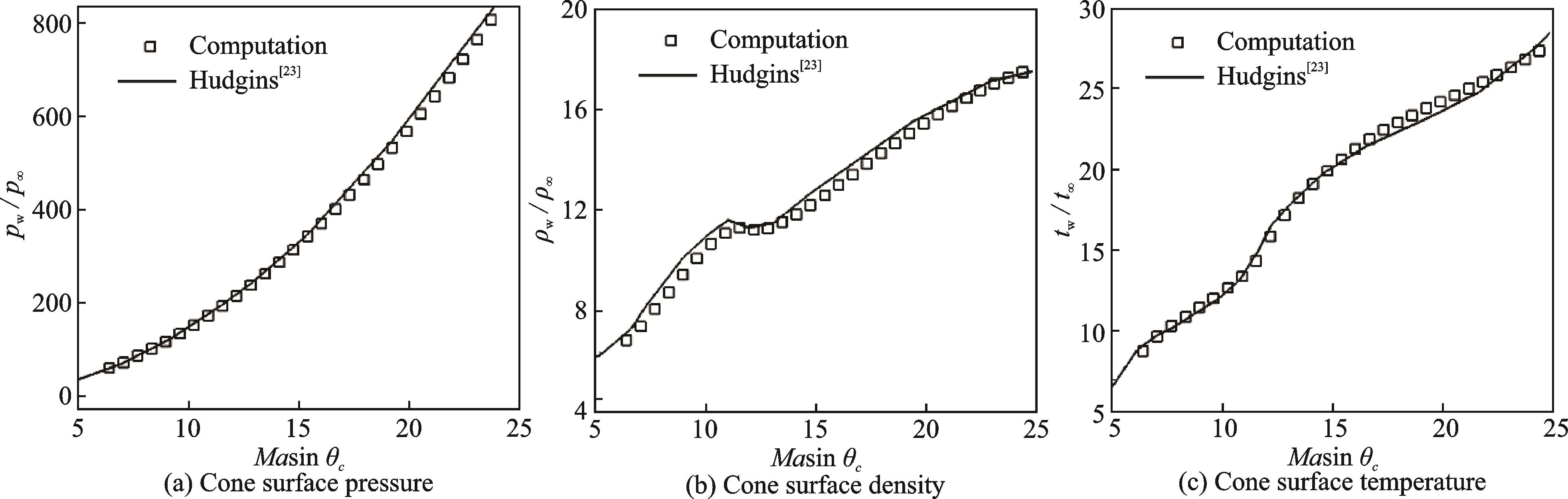
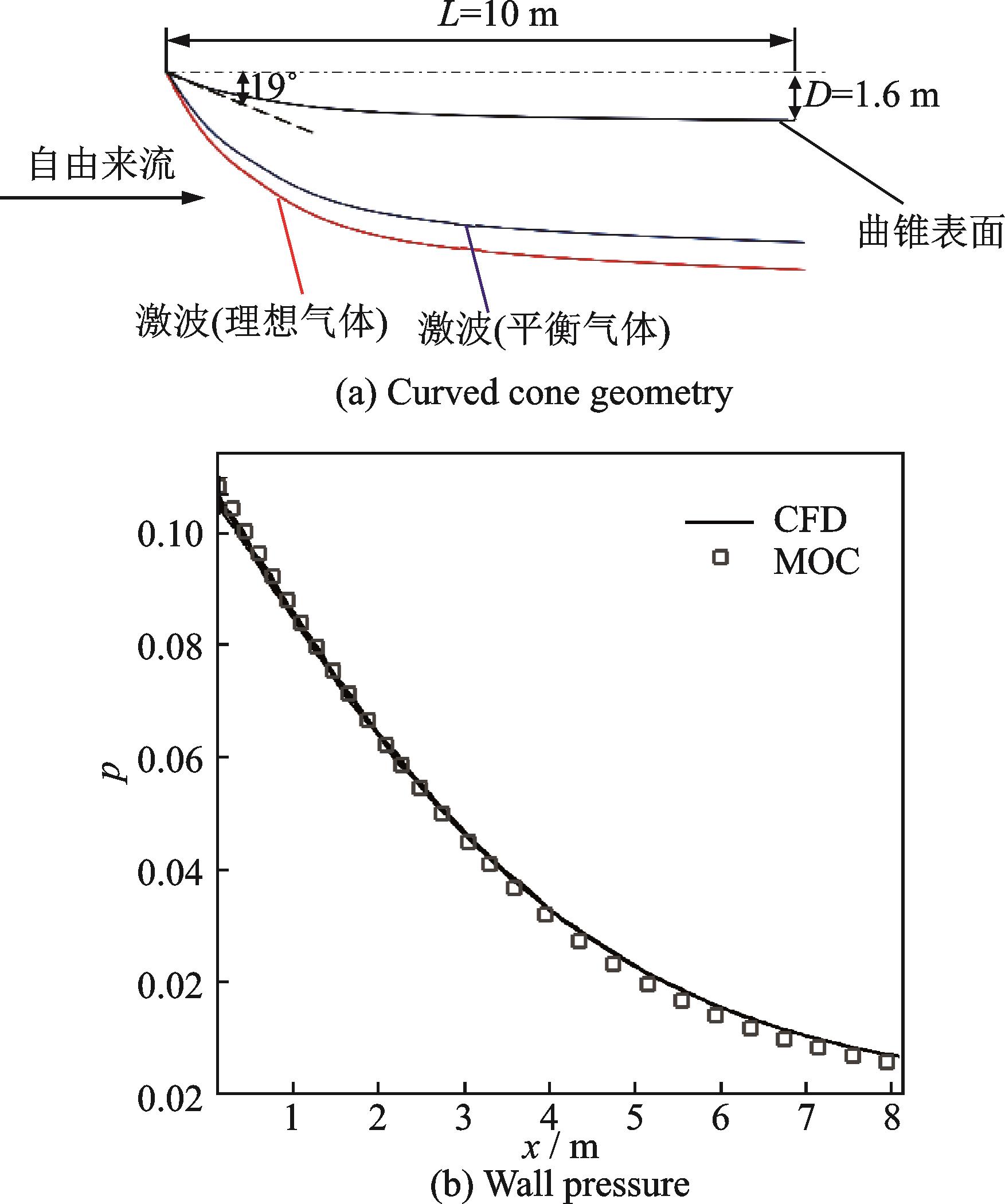
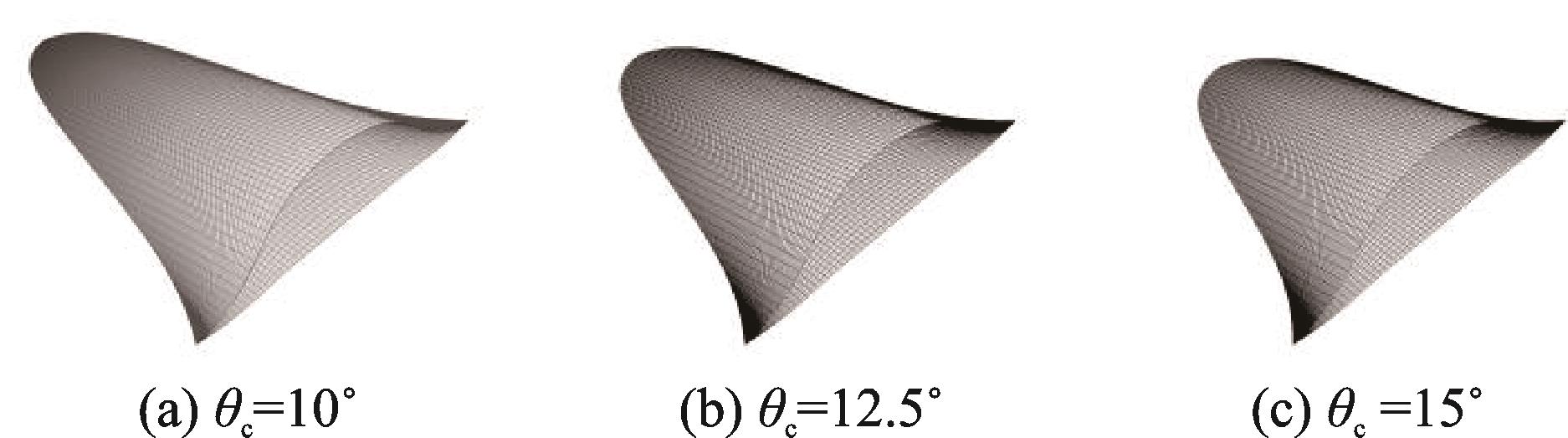
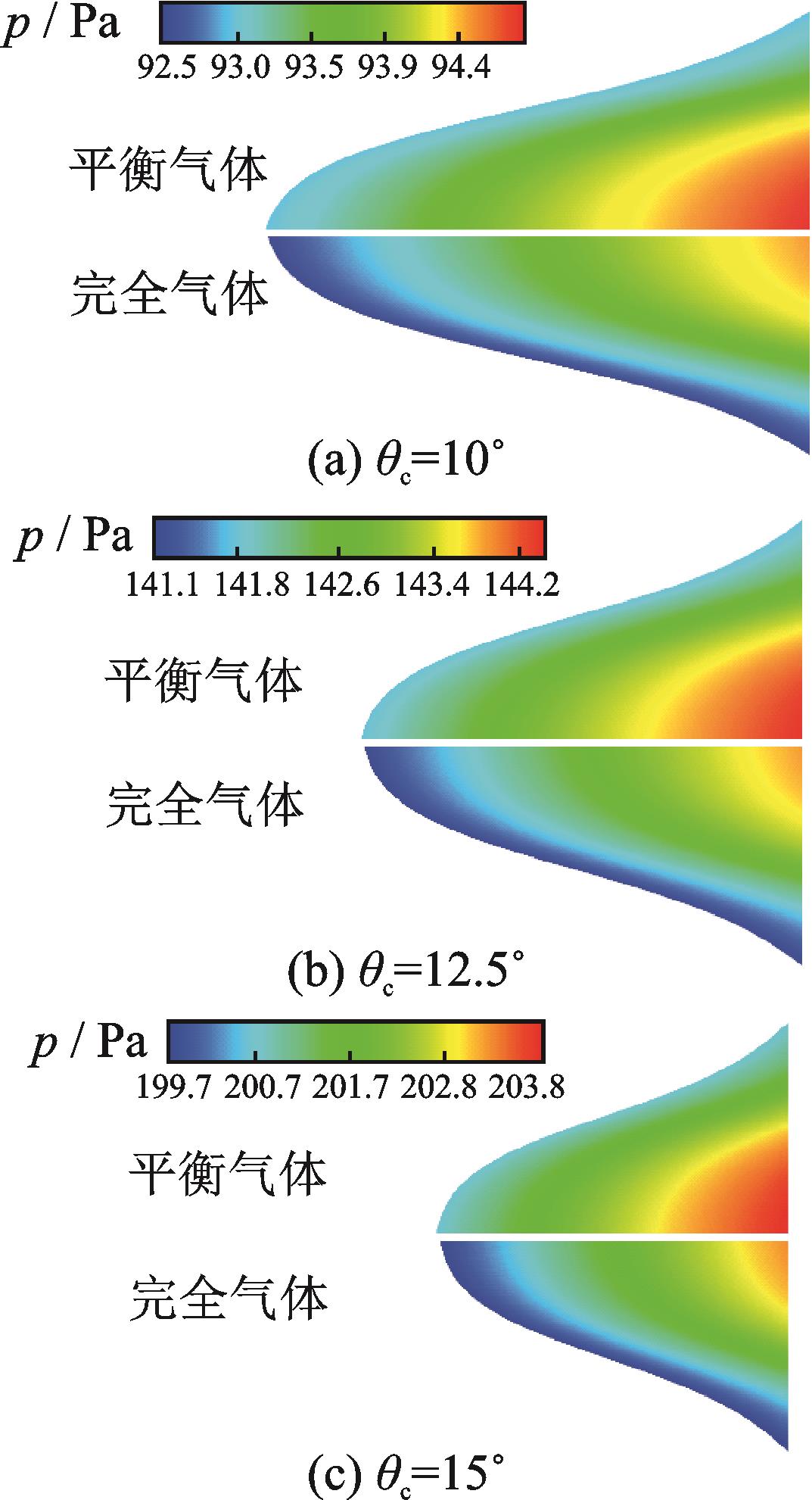
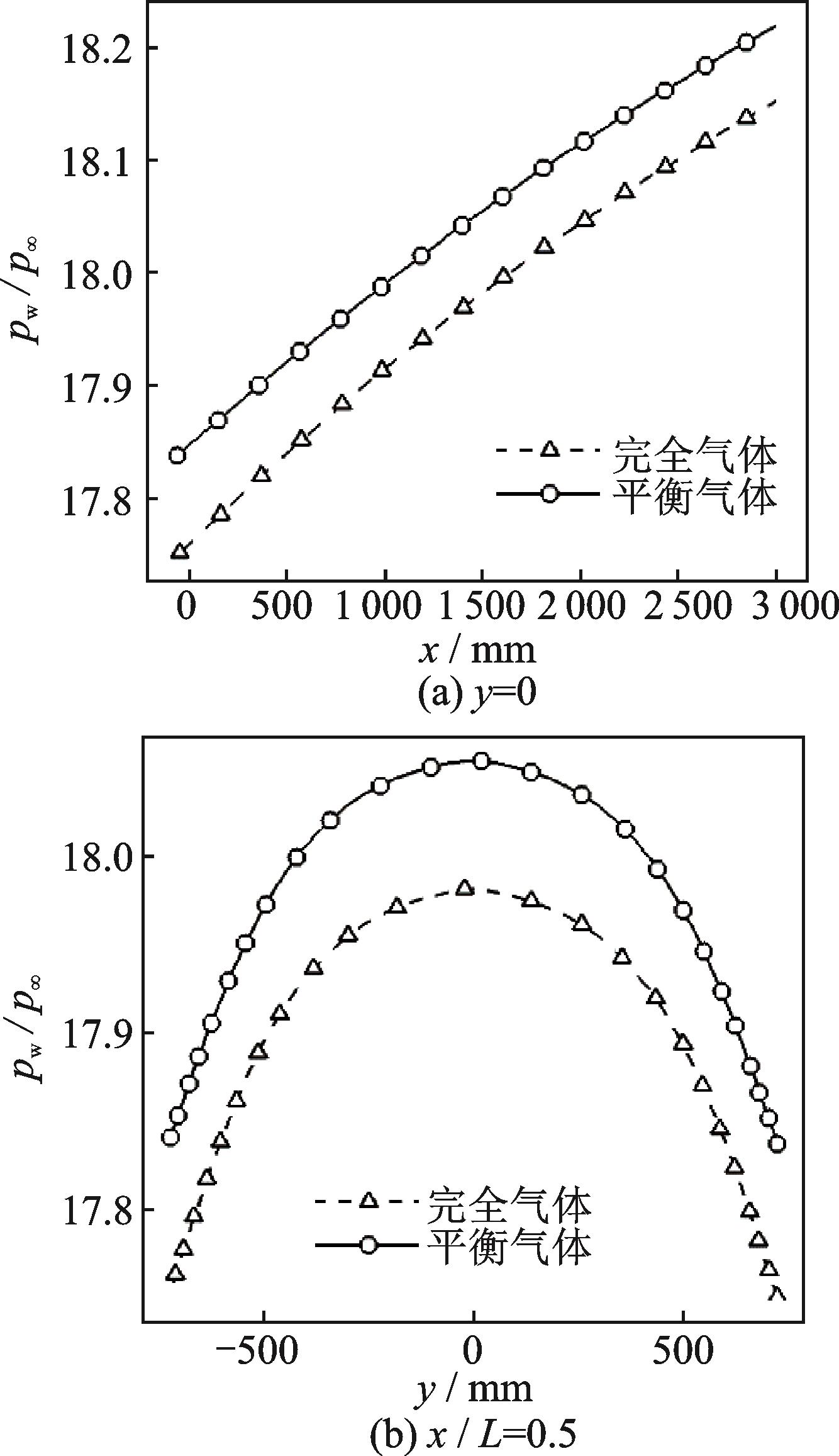
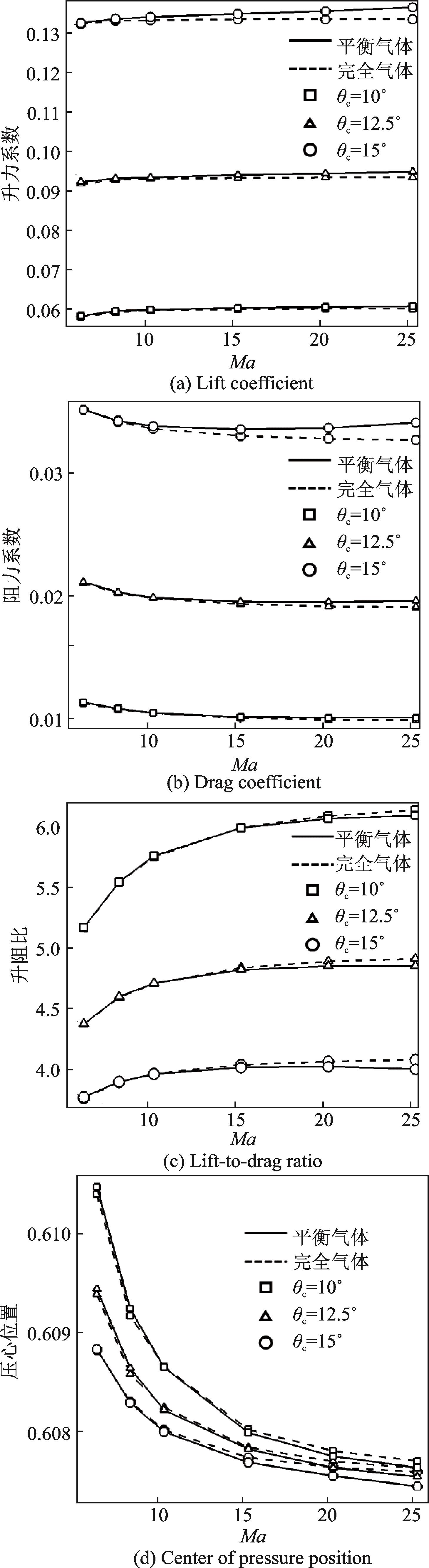
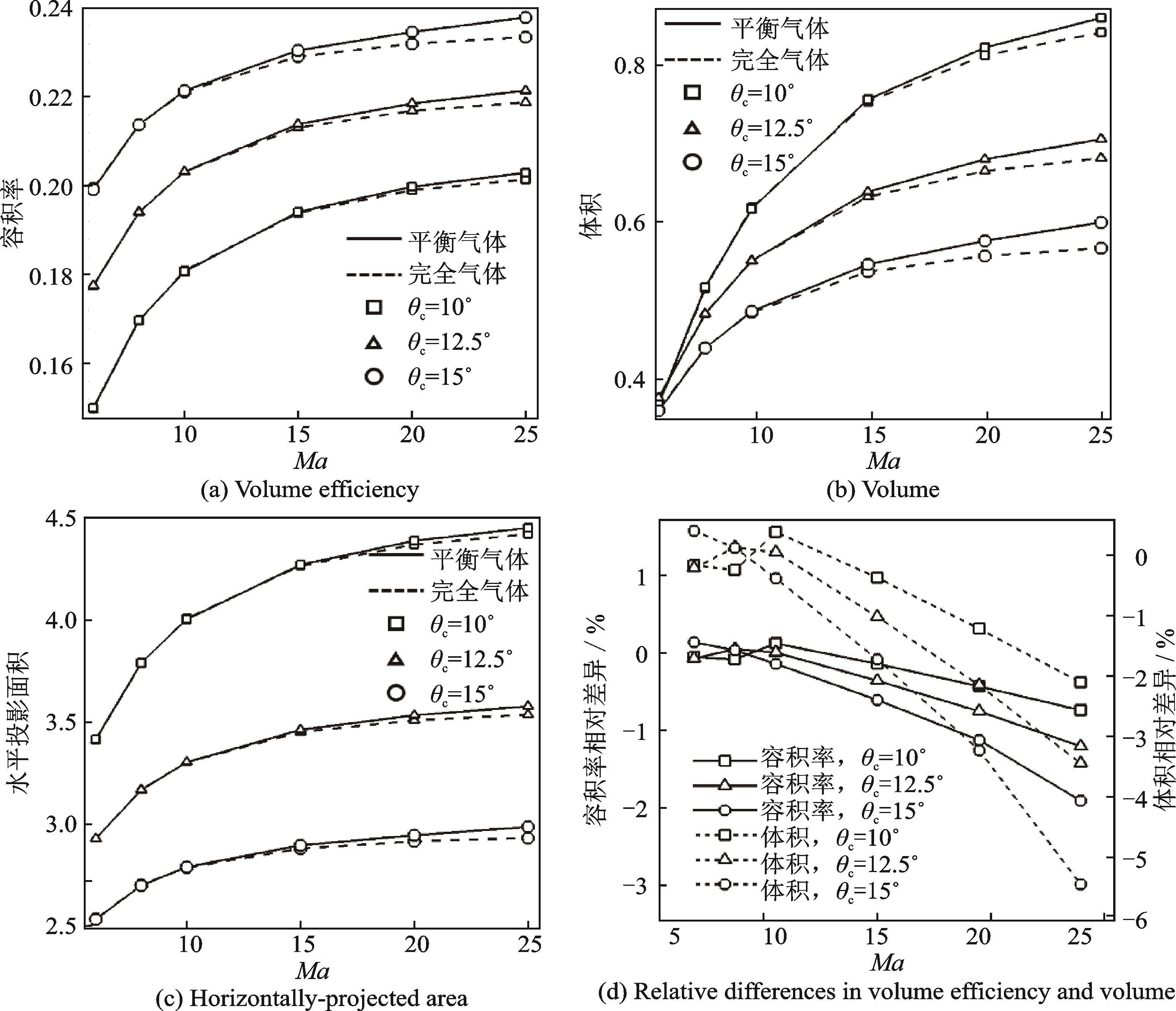
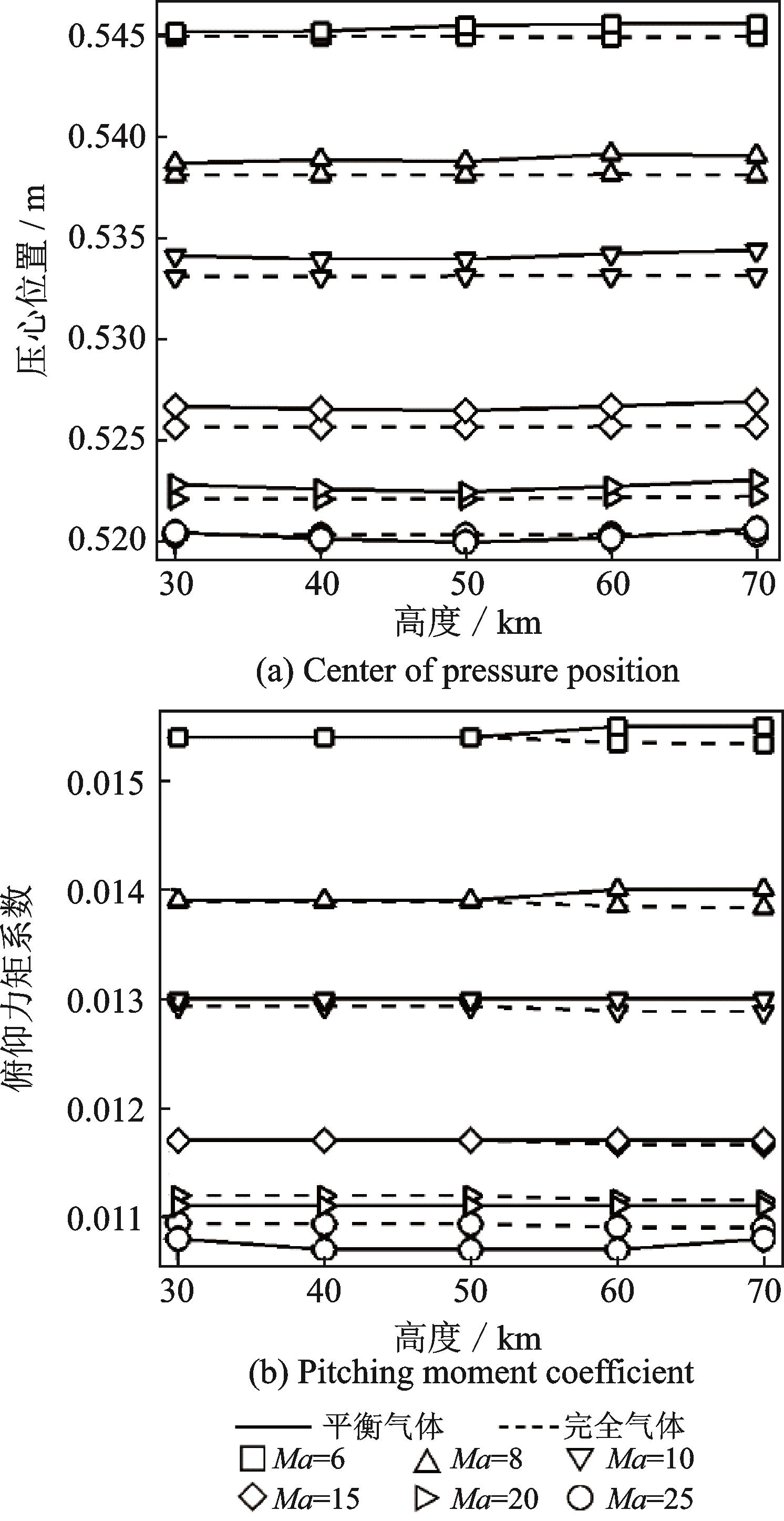
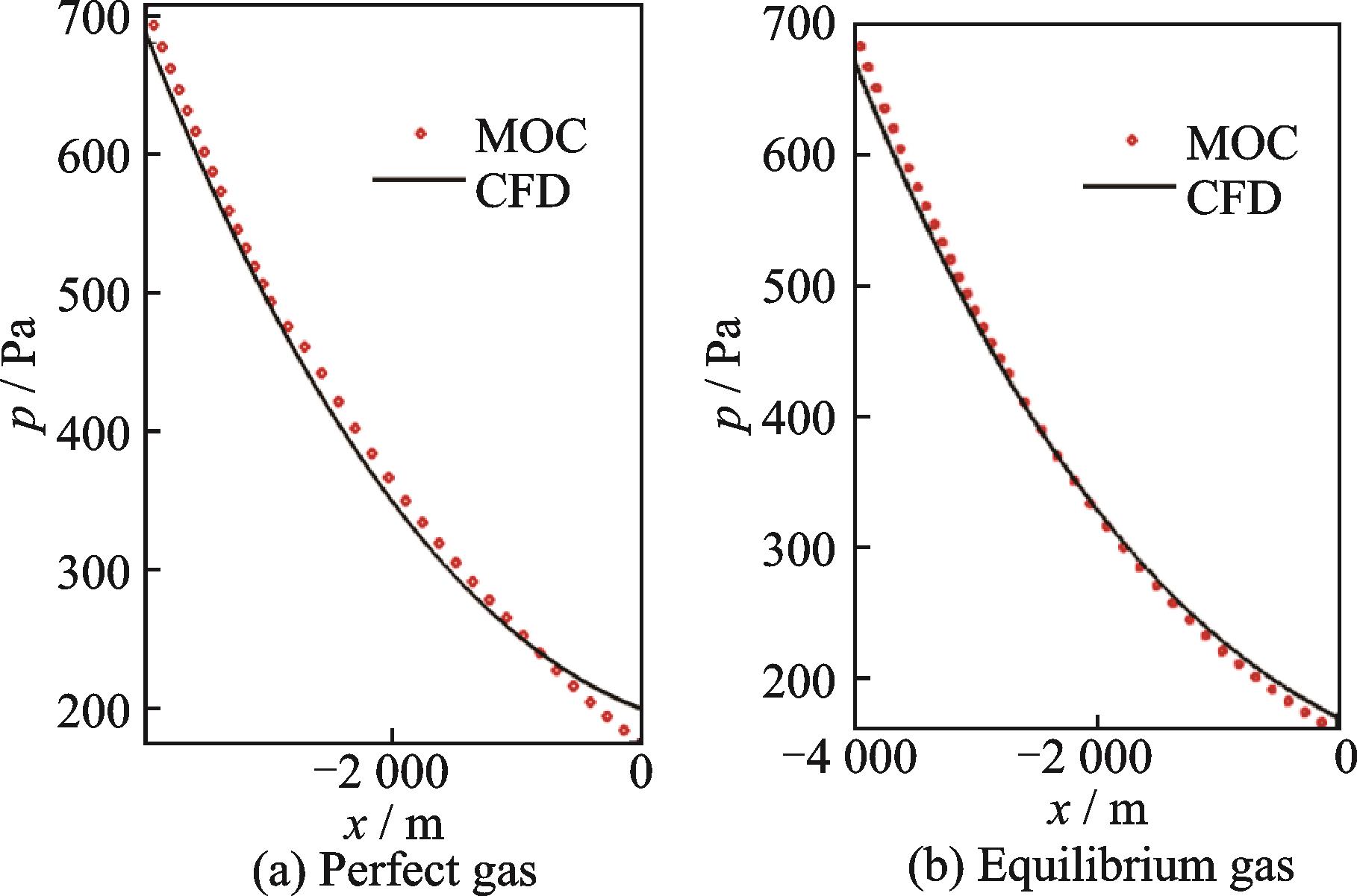
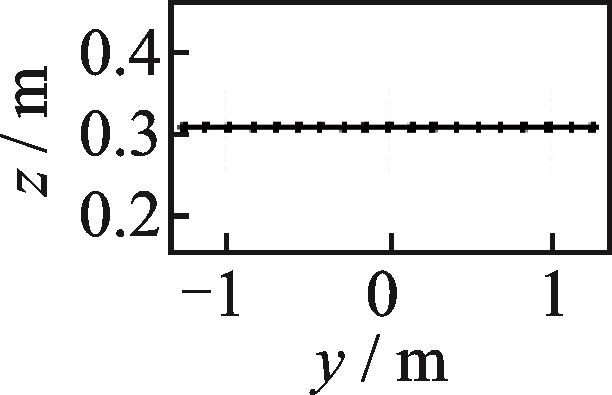
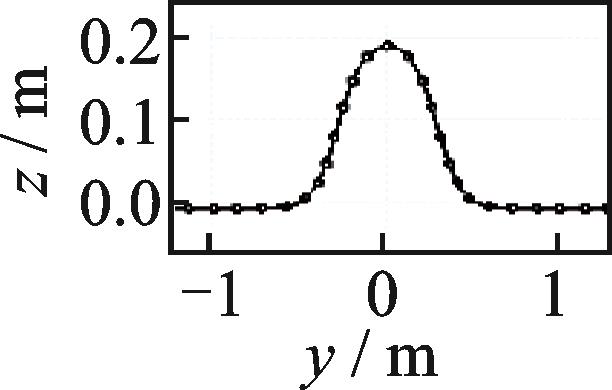
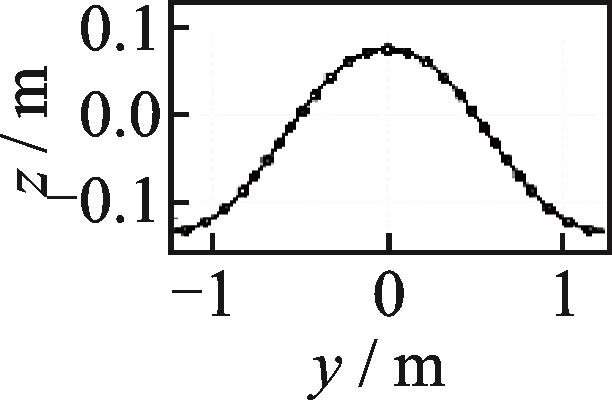
摘要: 乘波体在高空高超声速飞行时,流场温度急剧升高,气体热力学性质发生改变,其气动特性与采用完全气体模型得到的结果存在差异,因此在飞行器设计中开展真实气体效应影响研究具有重要的工程价值。本文针对锥导乘波体设计提出了一种考虑平衡气体效应的特征线方法(Method of characteristic, MOC),基于不同半锥角和不同流动捕获曲线生成了不同外形的乘波体,并使用快速估算方法估算平衡气体条件和完全气体条件下各乘波体的气动特性和几何特征参数,研究了不同气体模型对乘波体设计结果的影响。研究结果表明,高马赫数下基于平衡气体模型设计得到的乘波体升阻比、容积率和俯仰力矩系数等特性参数相比完全气体结果存在差异,并且平衡气体效应对不同外形乘波体的影响程度和影响规律不同。